先週、ご迷惑をおかけしましたが、その後火曜日から金曜日まで大学を休ませていただき、治療・休養に専念させていただきましたので、脚はすっかり良くなりました。
本日の講義で、第2回目の演習問題に誤植があるとの指摘をいただきましたので修正いたしました。修正稿はこちらからダウンロードしてください。
今は、(古典的な)ディジタル制御についての解説をしていますが、特にサンプル時間と波形の関係、s平面とz平面における極の配置と応答の関係について直感的に理解しておくことが大切だと思います。この議論に関する、ディジタル系のシミュレーションの結果に基づく補足説明資料をここに載せておきますので、よく見ておいていただけるといいと思います。
2006年12月11日月曜日
2006年12月4日月曜日
12/04の講義で立ったり歩けなかったりしたこと
午後の「制御CAD演習」の現場での詳しい指導をTAの鈴木君にお任せして、早退をさせていただき近所の整形外科で診察を受けました、足のレントゲン写真を撮った結果、骨には異常が無いことがわかりましたが、右足がかなり熱を持っていて腫れていました。結局はっきりした原因はわからないのですが、現在鼻血が大変出やすくなっているのと同様、脳梗塞の再発を防ぐために連続投与している血を固まらなくする薬「ワーファリン」を飲みつづけている間にはこのようなことがまま起こるという担当医の説明でした。すなわち、何らかの負荷で、足の毛細血管が損傷して小さな破れを生ずる場合、普通なら何のことなく治ってしまい特に症状が現れないものが、上記の薬のせいで内出血が止まらず、腫れあがってしまうこともあるのだそうです。(切れたのが脳の血管で無く足の血管でまだ良かったという感じです!)
ということで、自分が思っている以上に今は体がぽんこつになっているということを思い知らされました。現在の症状の改善には湿布をして足に負担をかけぬよう心臓よりも腫れている足を高く保持したまま安静にして治癒を待つという方法が最も良いということでした。
本日ご覧になってわかりますように、今は歩くことが難しい状態になってしまっていますので、明日火曜日は、特段のアポイントなど無いことを幸いに、大学を休ませていただき、自宅にて静かにします。
以上、もともと抱えている脳梗塞(の治療)にかかわる問題の顕在化ですが、特に新たに心配する要素はないようですので、どうかご安心ください。講義も最後まで問題なく続けられると思っています。ご迷惑をおかけしてすみませんでした。
ということで、自分が思っている以上に今は体がぽんこつになっているということを思い知らされました。現在の症状の改善には湿布をして足に負担をかけぬよう心臓よりも腫れている足を高く保持したまま安静にして治癒を待つという方法が最も良いということでした。
本日ご覧になってわかりますように、今は歩くことが難しい状態になってしまっていますので、明日火曜日は、特段のアポイントなど無いことを幸いに、大学を休ませていただき、自宅にて静かにします。
以上、もともと抱えている脳梗塞(の治療)にかかわる問題の顕在化ですが、特に新たに心配する要素はないようですので、どうかご安心ください。講義も最後まで問題なく続けられると思っています。ご迷惑をおかけしてすみませんでした。
12/04制御工学第二の講義/制御CAD演習について
昨日から急遽右足が不自由になってしまったため、きちんと立って板書をしながらの説明ができなくて十分意を尽くした講義にならず、申しわけありませんでした。
本日、補足としてお話をした、オブザーバ一般の説明資料と分離定理については、先週のブログで見ていただくことをお願いしたこちらを、また、その中で話題になっているd軸q軸の制御に関して、わかりいにくいと感じたときには、永久磁石形同期電動機の駆動制御に関するこちらの資料(数年前の古関の科研費の報告書からの抜粋になっています。)をご覧ください。
また、ディジタル制御に関する補足資料は、ここでご覧ください。ただし、これは書籍からの図面のコピーを含み、一般的な公開には著作権上の問題を含むため、講義履修者のみに見ていただくという意味で、ファイルを暗号化し講義中にお示ししたPWを付してあります。
<演習課題について>
あと、本日講義の最後に質問に来てくださった方がいらっしゃりますが、2回目の演習の[1]の(1)、有限時間最適レギュレータの「リカッチ方程式をまじめに解く」部分は、この問題の場合、微分方程式が単純な1従属変数の変数分離法の一階微分方程式の形できれいに積分できますので、そのことを利用してごく素直に計算していただければ良いと思います。(2)でtを-∞といってしまうと、その物理的意味がわかりにくいかもしれませんので、より単純にt<<t_1と考えていただくのが良いかもしれません。(2)(3)は次の問題との連続性を意識した設問になっています。
<本日午後の制御CAD演習:古関早退>
右足は講義中にも痛みが増してきていてちょっと深刻そうなので、午後の制御CAD演習は最初の説明後、現場の対応をTAの鈴木君にお願いして、病院に行くために早退をさせていただくつもりです。ご迷惑をおかけすることをあらかじめお詫び申し上げます。
本日、補足としてお話をした、オブザーバ一般の説明資料と分離定理については、先週のブログで見ていただくことをお願いしたこちらを、また、その中で話題になっているd軸q軸の制御に関して、わかりいにくいと感じたときには、永久磁石形同期電動機の駆動制御に関するこちらの資料(数年前の古関の科研費の報告書からの抜粋になっています。)をご覧ください。
また、ディジタル制御に関する補足資料は、ここでご覧ください。ただし、これは書籍からの図面のコピーを含み、一般的な公開には著作権上の問題を含むため、講義履修者のみに見ていただくという意味で、ファイルを暗号化し講義中にお示ししたPWを付してあります。
<演習課題について>
あと、本日講義の最後に質問に来てくださった方がいらっしゃりますが、2回目の演習の[1]の(1)、有限時間最適レギュレータの「リカッチ方程式をまじめに解く」部分は、この問題の場合、微分方程式が単純な1従属変数の変数分離法の一階微分方程式の形できれいに積分できますので、そのことを利用してごく素直に計算していただければ良いと思います。(2)でtを-∞といってしまうと、その物理的意味がわかりにくいかもしれませんので、より単純にt<<t_1と考えていただくのが良いかもしれません。(2)(3)は次の問題との連続性を意識した設問になっています。
<本日午後の制御CAD演習:古関早退>
右足は講義中にも痛みが増してきていてちょっと深刻そうなので、午後の制御CAD演習は最初の説明後、現場の対応をTAの鈴木君にお願いして、病院に行くために早退をさせていただくつもりです。ご迷惑をおかけすることをあらかじめお詫び申し上げます。
2006年11月27日月曜日
メールの対応が遅いことのお詫びと近況報告(楊助教授を囲んで)

先週は、ICEMSが長崎で開かれたこともあり、多くの関係者が日本を訪れました。古関自身も同会議の実行委員でありながら、この5月以来の病気のために、実質的な貢献が何も無いまま、会議当日も出席できずに、発表の代理を大学院生にお願いするという情けない状態でしたが、会議が成功裏に開催されたことをまずはお慶び申し上げます。
本研究室の最初の博士課程修了者である楊中平君(現在北京交通大学助教授)はじめ、先週は多くの訪問者がお見えになりました。電磁環境の委員会で会場の連絡を間違えるなど、自分自身の余裕のなさも感じざるを得ない日々で、いろいろな記録の取りまとめやメールへの返信ができておりません。不手際をお詫び申し上げます。
楊君を囲む会を週末に開き、研究室の卒業生が数人集まってくれました。それぞれが立派に社会に出て活躍している様子を聞かせてもらえるのは(自分自身がお酒を飲めないのが残念ではありますが、)何よりもうれしいことです。
制御工学第二: オブザーバと分離定理 (お詫びと12/4の予告)
本日の講義で、状態変数法の説明はすべておしまい、来週からは古典的なデジタル制御の説明に入るといいました。おおむねそれで良いのですが、本日オブザーバの話の中で、分離定理の説明をすることを忘れていたことに後で気づきました。12/4の講義では11/15のページにリンクしてあるオブザーバの説明資料(スライド)を用いて、講義の最初に分離定理の説明を短い時間で行いたいと思います。事前にこの資料に少し目を通しておいていただけると助かります。
制御工学第二 最適LQRのフィードバック則最適性の簡易証明
11/20の講義で概要を説明した、LQRのフィードバック則の最適性の簡易的な証明をここに掲載します。この証明が最適フィードバック則のみならず、評価関数の最小値も同時に与えていることに注意してください。また、あわせて、入力に対する重み R(t)を正定行列に限定したことの重要性も、実感できるかと思います。
2006年11月19日日曜日
制御工学第二 第2回演習プリント(12/18提出締切)12/11誤記修正!
最適レギュレータと、状態推定の練習問題である11/27 or 12/04 出題予定の第2回目の演習問題を、ここからダウンロードできるようにしておきます。
提出は12/18の講義開始時にお持ちいただくということにします。実験・演習など課題がいろいろあって大変な時期だと思いますが、頑張ってやってみてください。講義では直接扱わない最小次元オブザーバの簡単な設計練習も、ここで11/15にアップロードした資料などを参照しながら、試しに経験してみてください。(リンクを11/27にはりなおしました!また、既に演習を始めた人からの指摘により、[1]の誤植を12/11に訂正しています。)
提出は12/18の講義開始時にお持ちいただくということにします。実験・演習など課題がいろいろあって大変な時期だと思いますが、頑張ってやってみてください。講義では直接扱わない最小次元オブザーバの簡単な設計練習も、ここで11/15にアップロードした資料などを参照しながら、試しに経験してみてください。(リンクを11/27にはりなおしました!また、既に演習を始めた人からの指摘により、[1]の誤植を12/11に訂正しています。)
2006年11月15日水曜日
制御工学第二 状態推定器(オブザーバ)および多項式法に関する説明資料
昨年の秋に、日本能率協会のモータ技術フォーラムおよび日本技術士会の講演会で話をした内容をもとに、講義用に状態推定器についての説明をまとめました。昨年の経験では、このスライドを講義の際に用いるのは、説明が速くなりすぎてあまり効果的ではなかったのですが、復習のための自習用資料としてはそれなりに良くまとまっていると自負していますので、昨年度と同じ配付資料になりますが、御参考までに、ここからダウンロードできるようにしておきます。皆さんの勉強のお役に立てば幸甚です。
<正誤表> (ご指摘をいただき次第、追加・更新します!)
[1] 6ページ 「付加トルク」 ==> 「負荷トルク TL」
2006年11月13日月曜日
制御CAD演習 EA3 前半Gr最終レポート提出の期限
現在演習を行っている前半グループの最終レポートは
2007年1月10日(水曜日) 午後5時 @電気系事務室レポート提出用ポスト宛てに提出
を締め切りとします。
履修者は、5, 6日目の課題プリントをベースにして、レポート作成に励んでください。
(個々の能力とやる気に応じて、自由課題を設定し検討を広げてくださることを歓迎します!)
2007年1月10日(水曜日) 午後5時 @電気系事務室レポート提出用ポスト宛てに提出
を締め切りとします。
履修者は、5, 6日目の課題プリントをベースにして、レポート作成に励んでください。
(個々の能力とやる気に応じて、自由課題を設定し検討を広げてくださることを歓迎します!)
制御工学第二講義予定(11/13修正版)
制御工学第二の講義は10/30版の予定からさらに進行上の遅れを生じています。10/30修正・公開の予定表を再修正し、今後の予定をお 示しします。
まずは、11/27のレポート提出よろしくお願いします。
---------------------------------------------------------------------------------
制御工学第二講義予定
(01) 10/02 序論:夏学期の復習、本講義の扱う内容と制御工学全般における位置づけ、参考書について
10/09 (休日)
(02) 10/16 状態空間におけるシステムの取扱(1): 状態変数と状態方程式の考え方
(03) 10/23 状態空間におけるシステムの取扱(2): 実現問題、ラプラス変換との関係
(04) 10/30 状態空間におけるシステムの取扱(3): 状態遷移行列、時間応答シミュレーション
(06) 11/06 状態空間におけるシステムの取扱(4): 線形系における安定性判別、可制御性と可観測性、状態フィードバック概論
(07) 11/13 状態空間におけるシステムの取扱(5):状態フィードバック、極配置法、演習出題、最適制御の考え方とLQRの意味
(08) 11/20 状態空間におけるシステムの取扱(6):最適制御、 状態推定、システム同定
(09) 11/27 ディジタル制御(1): 第1回演習課題提出、第2回演習課題出題、空間量子化と時間量子化、サンプル動作の数学的表現、サンプリングを含む系とZ変換
(10) 12/04 ディジタル制御(2): ディジタル系安定性判別、ディジタル系のアナログ近似、演習出題
(11) 12/11 ディジタル制御(3): 有限整定とデッドビート応答
(12) 12/18 状態推定法、ディジタル制御演習
(13) 01/15 非線形制御入門(1)
(14) 01/22 堀教授特別講義: 外乱オブザーバとロバスト制御の話
(15) 01/29 非線形制御入門(2)演習出題
( ) 02/05 期末テスト?
2006年11月8日水曜日
意図せぬ講義延長のお詫び
本日午後の電気電子特別講義の司会を務めさせていただきましたが、その際、16:15までの講義時間を16:30までと思いこんでいて、本来の時間よりも講義を長引かせてしまいました。5限を取っていた方々には大変ご迷惑をお掛け致しました。ここに、お詫び申しあげます。
来週の講義も古関が進行を担当させていただきますが、同じ間違いを繰り返さぬよう努めますのでよろしく御願いします。会社の経験に基づく非常勤講師の先生の示唆に富むお話ですので、積極的に質問をして、貴重な機会を生かして欲しいと思います。
来週の講義も古関が進行を担当させていただきますが、同じ間違いを繰り返さぬよう努めますのでよろしく御願いします。会社の経験に基づく非常勤講師の先生の示唆に富むお話ですので、積極的に質問をして、貴重な機会を生かして欲しいと思います。
自分の名前をYahooで検索したら...
講義での活用を考えるとき、このページへのアクセスが容易であることも大事だと思って、自分の名前でyahooで検索をかけてみましたが、まだ上位にはこのページは出てきません。yahoo上の古関の旧HP、および研究室の公式HPからは容易にたどれますので実質的な問題はないかと思っています。
自分の名前で検索をかけたら、数年前に教養学部で行っていた物理学の講義に対する学生による非公式評価が出てきて、驚きました。恐ろしい時代になったものです。黒板の字が汚いと書かれていたので気をつけようと思いますが、まあ、字の汚いのは直らないでしょうね。
自分の名前で検索をかけたら、数年前に教養学部で行っていた物理学の講義に対する学生による非公式評価が出てきて、驚きました。恐ろしい時代になったものです。黒板の字が汚いと書かれていたので気をつけようと思いますが、まあ、字の汚いのは直らないでしょうね。
制御工学第二 平成18年度第1回演習問題
2006年11月6日月曜日
F君のアクチュエータの次の展開
金博士のTAの新提案から派生して考えた
F君の二号機のアイデア
(可動子構造強化部に、位置センシング、配線補助
の機能を持たせたもの)
残念なことに、Halbach磁石が持つ内部応力に、磁石を装着していた接着剤の力が勝てずに、前述の1号機については、虎の子の試験機を破損するという不幸を最近経験しています。
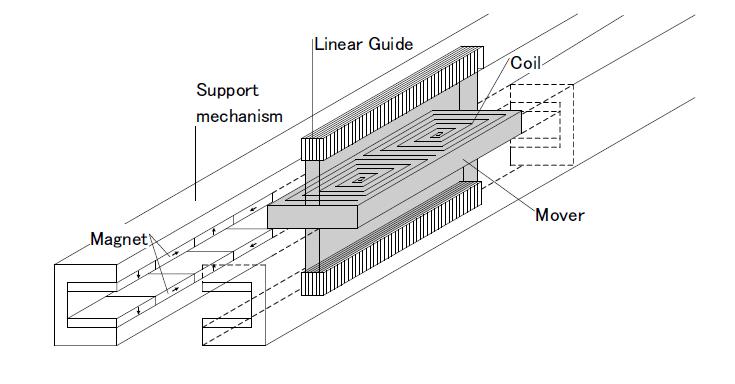
この後の新しい試験機の設計を、金博士のTAの構成を拝借して応用する形で行っていくのか、空心コイル+Halbach磁石配列のアイデアを引き継ぐ形で行うのかは未定です。もし後者でいく場合には、金博士がTAで新たに工夫された、構造強化部と類似の構造を持つ構造強化体を、空心コイル可動子の補強に用いる下図のようなタイプがよいのではないかと思います。詳細検討ができていないので、現段階では論文の形で成果公開ができませんが、そのアイデアは以下のようにしたいと思っています。
上図のように、可動子の構造強化部に、その側面を利用して、電源の配線や位置センシングなどの機能を搭載することで、システム全体としての小型化、軽量化に寄与するような構成ができれば良いと考えます。
このアイデアは、これまでもF君の奨学金申請や審査のために必要なところでは説明していたので、そういう意味で既に「公知の事実」ですが、これまでは、金博士の新しい提案のビジネス上の展開を阻害せぬよう、議論を一般の場で行うことは控えてきました。しかし、すでに、アイデアの元になっている構造強化部の構成を展示会で金博士が公開されたため、大手を振ってこの提案を皆様にお示しし、今後の研究開発のために御意見をいただくことができるようになりました。
今後、F君中心に具体的な検討を進め、何ヶ月か後の学会や展示会での議論に載せられるようになると良いと、JIMTOFでの展示者の熱意を感じて決意を新たにしました。
(といってもJIMTOFは大変人が多かったので、疲れてしまい、あまり多くの展示を見て回ることができなかったのは、病後の体ということで、自ら情けなく思った次第です。)
古関研での研究への金弘中博士の御支援

F君が修士研究で提案・設計し、
金博士の御助力で基礎特性測定にこぎつけた
空心電機子、Halbah可動子をもつ
リニア同期アクチュエータ第一号機
私達は、金博士からは多大な御支援をいただいています。古関研では、10/4の記事でも書いたとおり、熊本先生が提唱された二関節筋の機能をもつアクチュエータを、永久磁石形リニア同期モータとして実現するための基礎研究をしています。これに関係して、前出のF君が1年かけてアイデアを提案し設計、製作をした、Halbach磁石を可動子に持つ空心形リニアアクチュエータが、金博士の積極的なご支援のもと、ようやくその基礎特性を測定するまでにいたりました。
JIMTOFでの展示の様子と金弘中博士

今回は、先端的なモータ制御技術、産業用ロボットと工作機械の大手として有名な「黄色い会社」のF社の展示ブースが大変盛況でした。学生実習でS君がお世話になったK博士、M取締役から、モータドライブ、リニアモータ技術の応用の最新の研究成果、開発状況についてお話をうかがうことができました。
H研究所のTAで有名な金博士も、最新の成果を公開すると張り切って、静岡理工科大学の展示ブースで自慢のTAの紹介を大変熱心にされていました。その金博士の御紹介で、古関の病気後長らくお目にかかる機会の無かった、JSTのK博士とも久々にお目にかかることができ、うれしく感じました。K博士は、リニアドライブ、モータ制御技術の工作機械など産業応用を常に支持する活動をしてくださっていますので、これからわれわれの研究活動も、肯定的に見ていただけるよう、努めねばと決意を新たにしました。
金博士の最新成果は、永久磁石の可動子が軽く作られているため、構造的には弱い部分もあったのを、中央に「垂直尾翼」のような強化構造体をつけることで、本来のTAのメリットを損なわぬままに、構造の強化、大型化を図るもので、今回の展示会でも、その熱意が稔って多くのエンジニアの注目を集めていたようです。
JIMTOFを見学して

5月の病の後は、大学以外への外出は努めて控えてきたのですが、1年に1度の最新技術動向を学ぶ機会を逸するわけには行かないので、少し無理をして、11/2木曜日に、研究室の博士課程のF君、修士課程のS君とともに工作機械の見本市JIMTOFの見学に行きました。
WEBで登録していたにも関わらず、いきなり入り口で1時間以上の入場待ちとなり、大変な繁盛でした。これらの技術を支える、電気エネルギーコース、電気系の学科の大学における人気はここ数年低調といわざるを得ないのですが、産業界における関係分野のこの熱気との間の大きな乖離が、不思議に思われます。
11/5の制御CAD演習を終えて
第二回目のレポートを見て感じたこと
演習6の記載に10/30の正誤表にあるような、制御器の伝達特性の式に誤植があり、ご迷惑をおかけしたことをお詫びします。
本日出していただいたレポートを採点して、既に演習中に個々にコメントを返しましたが、全体として下記の<非常に初歩的な>問題点をもつ報告書が多かったと思います。次回からのレポート作成(本科目のみならず他の実験なども含めて一般的に!)では読む意味のあるレポート(=自分自身でまとめる意味のあるレポート)を書けるよう、一般的に共通してみられる問題点として以下の点に留意してください。
- 計算機演習共通の問題だが、アナログの対象の例題を扱っているにもかかわらず、有効数字の概念が抜け落ちている。
- 計算結果や、計算の過程を示すソースコードは記載されているが、考察、議論がきちんと書かれていない。
- 計算結果のグラフは、デフォルト設定で出力したままを印刷しているだけで、ゲイン余裕、位相余裕などを、どこで具体的に読み取ればいいのかなど、注目すべき点に関する記載や、そのために必要な目盛りをグラフに加えるなどの、読み手の立場に立った配慮に欠けていて、計算結果の取り扱いがぞんざいな感じがする。
- 日本語として意味不明な記述をしている人もいる。
- 複数の曲線をグラフに描いているときに、設定条件とその曲線の対応関係が明示されていないグラフがあった。
- シミュレーションを繰り返しながらゲインの探索をする部分で、どのような方法論で解答に近づいて言っているのかが明示されていない。(単なる試行錯誤でもよいが、その過程でも何らかの合理的な判断をしているはずなので、そのことを記録しておくべきであろう。)
- カラーのグラフをグレースケール化したときに、見えなくなってしまったものをそのまま載せているのは、レポートとして明らかな不備である。
- ソース、コードには、最低限、プログラムの目的、コードをした日付、変数の定義、主たる機能の定義などの説明的な記述を入れておくべきである。
当方の誤植を指摘してくれたことも含め、とてもよくできていると思ったレポートが2件ありました!!
2006年11月5日日曜日
The paper for the COE-workshop at the Dept. EE UOT, submitted by KOSEKI
The paper for the COE-workshop at the Dept. EE submitted by KOSEKI:
“Hybrid Magnetic Levitation Control Based on Fuzzy Model for a Contactless Servo-Actuator”
The paper “Hybrid Magnetic Levitation Control Based on Fuzzy Model for a Contactless Servo-Actuator” prepared for COE-workshop at the Dept. EE, UOT is available here.
“Hybrid Magnetic Levitation Control Based on Fuzzy Model for a Contactless Servo-Actuator”
The paper “Hybrid Magnetic Levitation Control Based on Fuzzy Model for a Contactless Servo-Actuator” prepared for COE-workshop at the Dept. EE, UOT is available here.
2006年10月30日月曜日
制御工学第二講義予定(10/30修正版)
制御工学第二の講義は(例年通り?)、当初予定からやや進行に遅れを生じていますので、10/2に公開した予定表に修正をして、これからの予定を改めてお示しします。本日は少し履修者の数が減り始めている気がしますが、もうすぐ演習問題の配布などもいたしますので、元気を出して御出席いただきますようお願いします。
---------------------------------------------------------------------------------
制御工学第二講義予定
(01) 10/02 序論:夏学期の復習、本講義の扱う内容と制御工学全般における位置づけ、参考書について
10/09 (休日)
(02) 10/16 状態空間におけるシステムの取扱(1): 状態変数と状態方程式の考え方
(03) 10/23 状態空間におけるシステムの取扱(2): 実現問題、ラプラス変換との関係
(04) 10/30 状態空間におけるシステムの取扱(3): 状態遷移行列、時間応答シミュレーション
(06) 11/06 状態空間におけるシステムの取扱(4):状態フィードバック、最適制御、演習出題
(07) 11/13 状態空間におけるシステムの取扱(5): 状態推定、システム同定
(08) 11/20 ディジタル制御(1): 空間量子化と時間量子化
(09) 11/27 ディジタル制御(2): サンプリング動作の数学的表現、サンプリングを含む系の取扱とZ変換
(10) 12/04 ディジタル制御(3): ディジタル系安定性判別、ディジタル系のアナログ近似、演習出題
(11) 12/11 ディジタル制御(4): 有限整定とデッドビート応答
(12) 12/18 状態推定法、ディジタル制御演習
(13) 01/15 非線形制御入門(1)
(14) 01/22 堀教授特別講義: 外乱オブザーバとロバスト制御の話
(15) 01/29 非線形制御入門(2)演習出題
( ) 02/05 期末テスト?
2006年10月29日日曜日
卒業生の結婚式
昨日は、卒業生の結婚式に呼ばれました。
とても信頼できる良い大学院生でしたので、きっとしっかりと幸せな家庭を築くのだろうと思い、うれしく参加させてもらいました。
職業柄「来賓」として挨拶をせねばならないのは、人生経験があまり豊かではないなかで辛いところもあります。しかし、研究室などでは知ることのできない家族の中での卒業生個人の顔をご家族との気さくなお話の中でかいま見ることができたり、クラブや高校などの友人との気のおけない関係を見せてもらえるので、自分の同期の友人の結婚式に出ていたときとは異なる楽しみ方も最近はあるなあと思いました。
結婚式は、主役の目が輝いていて、それぞれにこれからの暮らしに希望と決意を持っていることがよくわかりますので、大学で進学式や卒業式に参加させていただくのと同様、こちらも改めて襟を正す思いになります。
あと、スポーツ新聞の号外の様式を真似た二人の紹介記事?のプリントも良くできていて感心しました。パソコンのリテラシーに長けた世代の新しい楽しみかただと思いますが、なかなか凝っていて、あんなに上手に作るのは本当に大変だろうと思いました。
新郎の、<我が卒業生君>は、研究テーマの磁気浮上制御はうまくやったし、今もモータの専門技術者として第一線で良い活躍をしていますが、不可制御、不可観測、非線形の時変プラント?である新婦をどのように御していけるのかは未定です。あまり「制御の努力」はせずに、ほどほどの安定性にのみ注意して、自然に振る舞っていただくのが良いのでしょう。いずれにしても、家庭生活にはあまり制御工学的視点は直接的には役に立ちそうにありません。(不可制御、不可観測という概念を知っているだけで、いろいろなことに無理をしない、自然なコミュニケーションの限界を知ることで結果的に「信号」の入出力に格別の努力をするようになる、という消極的意味で大いに役に立つという考え方もありますが...)
ただし、優秀な人(=周囲から質の良い仕事が<いくらでも>できると思われている人)ほど、仕事と家庭生活のバランスには留意すべきと思います。
演習テキストの改訂作業が一段落ついたので、次は講義のテキストの方をまとめることをせねばと思いつつ....単なる無駄話でした。
とても信頼できる良い大学院生でしたので、きっとしっかりと幸せな家庭を築くのだろうと思い、うれしく参加させてもらいました。
職業柄「来賓」として挨拶をせねばならないのは、人生経験があまり豊かではないなかで辛いところもあります。しかし、研究室などでは知ることのできない家族の中での卒業生個人の顔をご家族との気さくなお話の中でかいま見ることができたり、クラブや高校などの友人との気のおけない関係を見せてもらえるので、自分の同期の友人の結婚式に出ていたときとは異なる楽しみ方も最近はあるなあと思いました。
結婚式は、主役の目が輝いていて、それぞれにこれからの暮らしに希望と決意を持っていることがよくわかりますので、大学で進学式や卒業式に参加させていただくのと同様、こちらも改めて襟を正す思いになります。
あと、スポーツ新聞の号外の様式を真似た二人の紹介記事?のプリントも良くできていて感心しました。パソコンのリテラシーに長けた世代の新しい楽しみかただと思いますが、なかなか凝っていて、あんなに上手に作るのは本当に大変だろうと思いました。
新郎の、<我が卒業生君>は、研究テーマの磁気浮上制御はうまくやったし、今もモータの専門技術者として第一線で良い活躍をしていますが、不可制御、不可観測、非線形の時変プラント?である新婦をどのように御していけるのかは未定です。あまり「制御の努力」はせずに、ほどほどの安定性にのみ注意して、自然に振る舞っていただくのが良いのでしょう。いずれにしても、家庭生活にはあまり制御工学的視点は直接的には役に立ちそうにありません。(不可制御、不可観測という概念を知っているだけで、いろいろなことに無理をしない、自然なコミュニケーションの限界を知ることで結果的に「信号」の入出力に格別の努力をするようになる、という消極的意味で大いに役に立つという考え方もありますが...)
ただし、優秀な人(=周囲から質の良い仕事が<いくらでも>できると思われている人)ほど、仕事と家庭生活のバランスには留意すべきと思います。
演習テキストの改訂作業が一段落ついたので、次は講義のテキストの方をまとめることをせねばと思いつつ....単なる無駄話でした。
2006年10月18日水曜日
制御CAD演習 第5,6日目応用課題(堀教授担当)のテキスト(10/18)
現在行っている基礎的な演習に引き続いて、最終レポートを書いていただくための第5, 6日目に割り当てられているの応用課題は
(1) 磁気浮上制御(担当 古関)
(2) ロバスト制御(担当 堀教授)
(3) 二慣性系の振動抑制御(担当 堀教授)
(4) 電気自動車のすべり率制御(担当 堀教授)
(5) カオスを応用した非線形系の制御(担当 堀教授)
です。
ただし、アプリケーションの相性の問題から電気自動車の課題の計算例のグラフは、表示が正しくされていません。この課題を選択する人は、演習の場で申し出てもらえれば、堀教授からお預かりしている紙バージョンのコピーを差し上げます。電子版提供ファイルに不具合のあることをお詫びします。また、この課題(4)はシミュレーションのサイズが大きいので、学生版のMATLABではアプリケーションの限界のため過大が完成しない可能性があります。その場合には、最初からScilabを利用してシミュレータを作成していただくか、TAに申し出て、研究室の商用版MATLABを使用する方がよいと思いますので、この課題を取る人はTAにご相談ください。
(1) 磁気浮上制御(担当 古関)
(2) ロバスト制御(担当 堀教授)
(3) 二慣性系の振動抑制御(担当 堀教授)
(4) 電気自動車のすべり率制御(担当 堀教授)
(5) カオスを応用した非線形系の制御(担当 堀教授)
です。
ただし、アプリケーションの相性の問題から電気自動車の課題の計算例のグラフは、表示が正しくされていません。この課題を選択する人は、演習の場で申し出てもらえれば、堀教授からお預かりしている紙バージョンのコピーを差し上げます。電子版提供ファイルに不具合のあることをお詫びします。また、この課題(4)はシミュレーションのサイズが大きいので、学生版のMATLABではアプリケーションの限界のため過大が完成しない可能性があります。その場合には、最初からScilabを利用してシミュレータを作成していただくか、TAに申し出て、研究室の商用版MATLABを使用する方がよいと思いますので、この課題を取る人はTAにご相談ください。
2006年10月9日月曜日
10/7-9の連休

この休みは、予想外にいろんなことがありました。10/7(土曜日)にはドイツのベルリン工科大学IFBから、研究員のM博士とその奥様が来日し、研究室で野崎君、山口君、福正君とリニアモータに関する研究について議論をしました。その後、「鉄ちゃん」のゲストおよび学生たちとともに、湘南モノレール/江ノ島/江ノ電ツアに行きました。ドイツ人の目には、江ノ島海岸のゴミが結構目に付いたようで、「日本人はドイツ人に比べてあまり環境保全に関心が無いようだ」といわれてしまいました。日本人が環境保全に関心が無いわけではない、少なくとも日本の産業分野における環境対策にかける努力は、先進国中でも群を抜いて大きなもののはずで、すべてのことに力を入れるわけにはいかない、とやや苦しい言い訳になりました。
大船からの湘南モノレールと、民家すれすれに通っていく江ノ電は、鉄ちゃんであるM博士の関心を惹いたようです。江ノ電は「まるでポルトガルの路面電車のようだ」との論評でした。
江ノ島には野崎君、福正君も同行し、研究者の国際交流を生で体験した事と思います。思えば、自分が修士1年生のときに、ベルギーから来た先生を指導教官が案内したのに同行した古関自身の初めての「国際交流」も江ノ島でした。何かの縁を感じます。
ということで遊んでいたため、まだ制御CAD演習のテキスト草稿はできていません。
大船からの湘南モノレールと、民家すれすれに通っていく江ノ電は、鉄ちゃんであるM博士の関心を惹いたようです。江ノ電は「まるでポルトガルの路面電車のようだ」との論評でした。
江ノ島には野崎君、福正君も同行し、研究者の国際交流を生で体験した事と思います。思えば、自分が修士1年生のときに、ベルギーから来た先生を指導教官が案内したのに同行した古関自身の初めての「国際交流」も江ノ島でした。何かの縁を感じます。
ということで遊んでいたため、まだ制御CAD演習のテキスト草稿はできていません。
2006年10月6日金曜日
ドイツの磁気浮上車Transrapidの衝突の原因
約2週間前にドイツのエムスランド試験線で起きた、ドイツの高速磁気浮上列車Traansrapidの衝突により23名の死亡者の出た不幸な事故に関して、オスナブリュック検察局は、調査の結果を公表し、2名の指令員による安全確認の人的ミスが原因であると、公式に発表したとの報道が10/4のテレビ番組で放送されています。これにより、本質的な技術的問題はないというのがドイツの政府の公式見解になるのでしょう。
2006年10月5日木曜日
お見舞いありがとうございます。
以前、交通関係の本の編集で大変お世話になった出版社のMさんと、その実質的なとりまとめの幹事として活躍されたKさんが、お見舞いに来てくださりました。講義の事務的連絡のために開いたこのページも、興味を持って見てくださっていることがわかり、少しうれしく思いました。Kさんは今をときめく自動車に関する研究の第一線で最先端のお仕事をされながらも、現状や将来動向を醒めた目で観ておられて、示唆に富んだお話を聞かせていただきましたが、今日も大変忙しいそうです。是非体に気をつけてほしいものと思いました。忙しい中をぬって、古関が生きていることを確認しに来てくださったお二人に感謝です。
2日前に宣言した、演習書の改訂、アップロードはまだできていません。ブログを出していると、いかに自分の仕事が計画の通りうまくいっていないかを、露呈するようで恐ろしいですね。
2日前に宣言した、演習書の改訂、アップロードはまだできていません。ブログを出していると、いかに自分の仕事が計画の通りうまくいっていないかを、露呈するようで恐ろしいですね。
2006年10月4日水曜日
熊本先生のご来訪と、新しい著書
京都大学名誉教授の熊本先生がお見舞いがてら、二関節筋モデルに関する最新の研究成果をまとめた「ヒューマノイド工学:生物進化から学ぶ2関節筋ロボット機構」という新しい著書を持って研究室に来てくださりました。堀研出身の畠博士も、編集幹事としてなかなか良い仕事をしたものと思いました。
現在実験機が故障中ですが、修士2年生の福正君が設計し、日立研究所金博士、信越化学の青山氏のご協力を得て製作したHalbach永久磁石形空心リニアアクチュエータに関する検討状況を、福正君に説明してもらいました。このアクチュエータが、本当に人工の2関節筋として、ロボットの駆動制御に応用できる日を目標に、研究を進めていきたいと思います。まずは「ヒューマノイド工学:生物進化から学ぶ2関節筋ロボット機構」をよく読んで、基礎的な理論をきちんと自分のものにせねばなりません。
現在実験機が故障中ですが、修士2年生の福正君が設計し、日立研究所金博士、信越化学の青山氏のご協力を得て製作したHalbach永久磁石形空心リニアアクチュエータに関する検討状況を、福正君に説明してもらいました。このアクチュエータが、本当に人工の2関節筋として、ロボットの駆動制御に応用できる日を目標に、研究を進めていきたいと思います。まずは「ヒューマノイド工学:生物進化から学ぶ2関節筋ロボット機構」をよく読んで、基礎的な理論をきちんと自分のものにせねばなりません。
2006年10月3日火曜日
停まっている京王線の中で
月曜日1限の講義のためには、5時に起床しまだ暗い6時過ぎには家を出ているので、火曜日はその反動で6時半くらいまで寝坊をしてしまい、少し家を出るのが遅くなります。そうして調布駅まで出てきたら、京王線が停まっています。そのまま混んだ列車で経っているのは時間の無駄なので、すいている各駅停車に座ってノートPCを出しました。バッテリーの持ちの良いノートPCにPHSのカード(b-moile)をつけておけば、回線速度は遅くても一応いたるところofficeになりますので、「裁量労働制」の長所をフルに生かさせてもらい、とりあえず仕事や勉強を電車の中で始めることができます。でも、人と会う約束などがあれば、どうにも代替手段は無いので、やはり列車ダイヤの乱れは、通勤者にとっては深刻な問題だと思います。
研究室の重点テーマとして、修士課程の大山君、原君に担当してもらっている、運転整理の計算機支援の研究についていつも議論をしているので、このような通勤途上の列車運行の乱れも、技術的関心を持って観察させてもらうのですが、京王線のようにもともと多種の列車群が、複線で一杯に詰まっている運行の中で、都心側末端の新宿駅での折り返しが本質的制約になっているような場合には、すべての列車を一様に遅く走らせたまった乗客を少しずつ拾い上げていくということしかないのかなぁとも思います。(京王線の場合、それでも優等列車をとにかく優先的に新宿まで持っていこうという強いポリシーは感じられますが。)
もし自分自身がとても急ぐとすれば、乗客ができる最低限の努力として、明大前から井の頭線へ逃げるということくらいでしょうが、一乗客として取ることのできる行動の選択肢はほとんど無いと思います。優等列車に乗っても、すべての筋が「ねている」以上、時間的な差はあまり無いと思うので、本日はこのまま、各駅停車の座席に座って、できる作業を粛々と進めていこうと思います。ブログは、細かなタグの文法などを調べることなく、とりあえず思ったことをテキストエディタで書いておけば情報発信できるので、このような中途半端な作業環境の中では確かに利点の大きい道具だと思います。
できれば本日中に制御CAD演習指導書の一部をアップロードできれば良いと思っています。
研究室の重点テーマとして、修士課程の大山君、原君に担当してもらっている、運転整理の計算機支援の研究についていつも議論をしているので、このような通勤途上の列車運行の乱れも、技術的関心を持って観察させてもらうのですが、京王線のようにもともと多種の列車群が、複線で一杯に詰まっている運行の中で、都心側末端の新宿駅での折り返しが本質的制約になっているような場合には、すべての列車を一様に遅く走らせたまった乗客を少しずつ拾い上げていくということしかないのかなぁとも思います。(京王線の場合、それでも優等列車をとにかく優先的に新宿まで持っていこうという強いポリシーは感じられますが。)
もし自分自身がとても急ぐとすれば、乗客ができる最低限の努力として、明大前から井の頭線へ逃げるということくらいでしょうが、一乗客として取ることのできる行動の選択肢はほとんど無いと思います。優等列車に乗っても、すべての筋が「ねている」以上、時間的な差はあまり無いと思うので、本日はこのまま、各駅停車の座席に座って、できる作業を粛々と進めていこうと思います。ブログは、細かなタグの文法などを調べることなく、とりあえず思ったことをテキストエディタで書いておけば情報発信できるので、このような中途半端な作業環境の中では確かに利点の大きい道具だと思います。
できれば本日中に制御CAD演習指導書の一部をアップロードできれば良いと思っています。
Knoppixはいいですよ。
前のYahooのページにも書きましたが、CD起動のKnoppixを、常用機のOSがつぶれた際のファイル退避の手段として、古くなってWindowsのOSが使えなくなっているPC(もとWin-ME機)の再活用のため、そして海外出張のための「お守り」として、これまでも愛用してきました。また、講義や演習などを通じて、学生の皆さんにも試用を推奨してきました。
ところで、このブログの開設に伴い、昨日からグーグルのGMailを使い始めましたが、そうすると過去のメールの文書がすべてネット側にあるので、このCD-ROM起動のLinuxのありがたみが増した感じです。これからは、本当に自分のPCを持ち歩かなくても何とかなるかも...と思います。しかし、やはり、今のように通勤電車が停まったときでも仕事をするためには、PCの持ち歩きも必要かもしれません。
(あいまいな結論ですみません。論文やレポートでこのような文章を絶対に書いてはならないと院生に言いながら、自分は論旨のふらふらした文章を書いています。)
ところで、このブログの開設に伴い、昨日からグーグルのGMailを使い始めましたが、そうすると過去のメールの文書がすべてネット側にあるので、このCD-ROM起動のLinuxのありがたみが増した感じです。これからは、本当に自分のPCを持ち歩かなくても何とかなるかも...と思います。しかし、やはり、今のように通勤電車が停まったときでも仕事をするためには、PCの持ち歩きも必要かもしれません。
(あいまいな結論ですみません。論文やレポートでこのような文章を絶対に書いてはならないと院生に言いながら、自分は論旨のふらふらした文章を書いています。)
2006年10月2日月曜日
制御CAD演習の連絡(本日ガイダンス補足)
本日の小野先生のガイダンスにもあったように、PC持参で2号館12階の古関研:123D1に10/16 12:55ころお集まりください。必要なソフトはUSBメモリでお渡しします。(現在TAの鈴木君が動作試験をしています。)
前半7名、後半8名の構成です。前半の班は11/13, 後半の班は 12/18に堀教授が現場指導をしてくださります。それ以外は、古関とTAの鈴木武海(古関研 M1)が担当します。堀先生の現場指導の日も鈴木は現場での指導補助に当たり、古関も周辺をふらふらしていることと思います。
前半7名、後半8名の構成です。前半の班は11/13, 後半の班は 12/18に堀教授が現場指導をしてくださります。それ以外は、古関とTAの鈴木武海(古関研 M1)が担当します。堀先生の現場指導の日も鈴木は現場での指導補助に当たり、古関も周辺をふらふらしていることと思います。
「制御工学第二@242号教室」たくさん来てくれてありがとう!

本日開講の旨を明示的に掲示していなかったにもかかわらず、本日の朝一番の講義で20名以上の皆さんが聴きに来てくださっていたのは、うれしい驚きでした。皆さんの熱心な聴講に応えることができるよう、良い講義となるよう努めます。生物化学科からの聴講生もいて、ちょっと緊張しました。
本日お話をした「制御入門編」に関係して、イギリスのバーミンガムの博物館で撮影してきた、本格的なフィードバック制御器の最も古いものといわれている、蒸気機関の弁の開閉を自動制御するための「調速器」の写真を上に載せておきます。
その後堀教授とお話をして、堀教授には1/22にお話いただくことにしました。昨日の表もそれに応じて書き換えておきます。
月曜の朝一番はお互いにつらいこともありますが、頑張りましょう。
2006年10月1日日曜日
「制御工学第二」教科書について
現在、堀教授の「応用制御工学」を、推奨参考書として、教科書指定の無いまま、「制御工学第二」の講義は続けておりますが、実は、古関は制御工学第二および一部演習問題の形で制御CAD演習の内容を含む教科書を執筆するという宿題を数年前から抱え込んでいます。寛大な出版社のご担当の方の督促にもかかわらず、遅々としてその執筆が進まぬままに、本年度も教科書無しのまま講義を開始することになりましたことをお恥ずかしく思います。せっかくこのような情報発信の場を得ましたので、今後講義の連絡とともに、この本の原稿の一部ができ次第、随時ベータ版として、このページに公開してみたいと思います。皆様からの貴重なコメントもいただいて、「フィードバック」をかけ、より良い物ができたら出版社の方に目を通していただき出版に結びつけるというような、今風の仕事の進め方をこの後半年くらいできると良いと勝手に考えております。どうか、忌憚の無いご意見をいただくという点で、皆様のご協力をよろしくお願い申し上げます。
古関の病欠およびその後の体調について
誠に不本意ながら、古関は去る5月24日に午後、執務中教員室にて激しい回転性めまいのため倒れました。
幸い秘書による発見が早く、すぐに救急車で東京大学病院に搬送され緊急入院を致しました。その後2日間前庭神経炎の治療を耳鼻科にて受けましたが、説明の付かぬ咽喉部の麻痺と呼吸の低下が発見されました。神経内科の宿直医による緊急MRI検査の結果、進行性の小脳の脳梗塞で左側の小脳の細胞の殆どが失われていること、梗塞の一部が呼吸の制御を担っている延髄の一部に広がりつつあることが発見され、急遽神経内科に転科、本人は詳しく事実を説明されぬままに、夜中に家族が病院に呼ばれ、「左椎骨動脈の内壁解離による左小脳の梗塞」の診断について医師の説明を受けるという事態になりました。
その結果、当初は食事も禁止、用便のために上半身を起こすことすら許されぬ絶対安静で24時間監視されるような重病人の扱いを受けておりましたが、その後食事が許され、車いすでトイレに行くことも許可されるようになり、長期の入院生活を覚悟することとなりました。血液の凝固を防ぐ投薬を続けながら自然治癒を待つという入院生活の中、想定される最も良い経過をたどることが出来、手紙を書いたり歩行の訓練をすることが許されるようになり、この間に懸念された脳出血による容態の急変を避けることが出来たので、約3遊間で退院、自宅療養できるようになりました。体を起こした当初の数日は、バランスが悪く酒に酔ったような歩き方でしたが、入院中・自宅療養を通じての歩行訓練を経て、普通に歩けるようになりました。
8月下旬に大学の産業医の面談を経て、後遺障害のほとんどないことを認めてもらい、投薬治療が1年続くことから定時の出・退勤を条件に9月1日から正式に職場復帰をすることができました。
発症時の発見が早かったことと、入院後の担当医の先生の専門医としての判断が的確でタイムリーに必要な措置をとってくださったこと、そして良くなるまで本当のことを知らされぬ中古関自身が1日も早く職場復帰しようと気持ちが張りつめていたこともおそらくは幸いして、参考資料にある「幸福な10%の患者」の仲間入りをすることが出来、現在、深刻な障害を負うことなく大学で仕事を続けることが出来ることになりました。
したがって、現在は大学内の業務は通常の通り遂行しており、講義も普通に行いたいと思います。一方、治療が続いていることもあって、万全の体調とは言えず、図らずも講義の進行に若干の乱れを生ずる可能性を現時点では否定できないことをあらかじめご了承ください。
幸い秘書による発見が早く、すぐに救急車で東京大学病院に搬送され緊急入院を致しました。その後2日間前庭神経炎の治療を耳鼻科にて受けましたが、説明の付かぬ咽喉部の麻痺と呼吸の低下が発見されました。神経内科の宿直医による緊急MRI検査の結果、進行性の小脳の脳梗塞で左側の小脳の細胞の殆どが失われていること、梗塞の一部が呼吸の制御を担っている延髄の一部に広がりつつあることが発見され、急遽神経内科に転科、本人は詳しく事実を説明されぬままに、夜中に家族が病院に呼ばれ、「左椎骨動脈の内壁解離による左小脳の梗塞」の診断について医師の説明を受けるという事態になりました。
その結果、当初は食事も禁止、用便のために上半身を起こすことすら許されぬ絶対安静で24時間監視されるような重病人の扱いを受けておりましたが、その後食事が許され、車いすでトイレに行くことも許可されるようになり、長期の入院生活を覚悟することとなりました。血液の凝固を防ぐ投薬を続けながら自然治癒を待つという入院生活の中、想定される最も良い経過をたどることが出来、手紙を書いたり歩行の訓練をすることが許されるようになり、この間に懸念された脳出血による容態の急変を避けることが出来たので、約3遊間で退院、自宅療養できるようになりました。体を起こした当初の数日は、バランスが悪く酒に酔ったような歩き方でしたが、入院中・自宅療養を通じての歩行訓練を経て、普通に歩けるようになりました。
8月下旬に大学の産業医の面談を経て、後遺障害のほとんどないことを認めてもらい、投薬治療が1年続くことから定時の出・退勤を条件に9月1日から正式に職場復帰をすることができました。
発症時の発見が早かったことと、入院後の担当医の先生の専門医としての判断が的確でタイムリーに必要な措置をとってくださったこと、そして良くなるまで本当のことを知らされぬ中古関自身が1日も早く職場復帰しようと気持ちが張りつめていたこともおそらくは幸いして、参考資料にある「幸福な10%の患者」の仲間入りをすることが出来、現在、深刻な障害を負うことなく大学で仕事を続けることが出来ることになりました。
したがって、現在は大学内の業務は通常の通り遂行しており、講義も普通に行いたいと思います。一方、治療が続いていることもあって、万全の体調とは言えず、図らずも講義の進行に若干の乱れを生ずる可能性を現時点では否定できないことをあらかじめご了承ください。
講義に関する補足資料の入手方法について
原則的にYahoo上に置いたファイルを、このページからのリンクで入手できるようにしたいと思います。
制御工学第二の講義スケジュールに関して、このページに掲載したものと同じ内容ですが、pdfに変換したものを、動作試験としておいてみます。 これをクリックして、ファイルが入手可能かどうか、試してみてください!
制御工学第二の講義スケジュールに関して、このページに掲載したものと同じ内容ですが、pdfに変換したものを、動作試験としておいてみます。 これをクリックして、ファイルが入手可能かどうか、試してみてください!
3年生冬学期講義「制御工学第二」の進め方に関して
講義の進捗状況および堀教授との日程調整により変更の可能性がありますが、現段階での案として以下の日程を考えています。(変更は、適宜修正・付記します。)
本講義の指定教科書はありません。下に推奨参考書として挙げている、堀洋一著「応用制御工学」(丸善出版)は生協、アマゾンなどで容易に入手可能と思いますが、問題があれば教えてください。
--以下、第1回目の講義に関わる資料--
制御工学第II
古関隆章・堀 洋一
Ext. 26676, koseki@koseki.t.u-tokyo.ac.jp
制御工学第一の内容(復習)
1.序論
1.1 制御工学とは何か
1.2 制御システムの例,分類
1.3 閉ループ制御と開ループ制御
1.4 制御工学の歴史
2.システム動特性の表現
2.1 信号伝達と状態遷移
2.2 動作点まわりの線形化
2.3 線形システムの表現
(2.4 ラプラス変換法の基礎)
2.5 ブロック図とその合成
2.6 特性の計測法
3.制御システムの安定性
3.1 線形システムの安定性
3.2 ラウスの安定判別法
3.3 ナイキストの安定判別法
3.4 フィードバック系の安定度指標
4.フィードバック制御系の基本特性
4.1 入力追従特性と外乱抑圧特性
4.2 定常誤差と誤差係数
4.3 2次系の過渡応答
4.4 2次系の周波数応答
4.5 高次系の代表根
5.線形フィードバック系の補償
5.1 フィードバック制御系設計の基本指針
5.2 直列補償とフィードバック補償
5.3 ニコルズ線図を用いた制御系設計
5.4 根軌跡を用いた制御系設計
5.5 直列補償とPID調節計
5.6 フィードバック補償
制御工学第二から制御Ⅰへ移行
古典的制御の復習と状態空間法との関係(フィードバック制御と多項式法など)
状態空間におけるシステム序論:連続量と離散量
制御工学第二講義予定
(01) 10/02 状態空間におけるシステムの取扱(1):夏学期の復習、状態変数と状態方程式、状態遷移行列
10/09 (休日)
(02) 10/16 状態空間におけるシステムの取扱(2): 実現問題、時間応答シミュレーション
(03) 10/23 状態空間におけるシステムの取扱(3):状態フィードバック、最適制御、演習出題
(04) 10/30 状態空間におけるシステムの取扱(4): 状態推定、システム同定
(06) 11/06 状態空間法、最適制御演習
(07) 11/13 ディジタル制御(1): 空間量子化と時間量子化
(08) 11/20 ディジタル制御(2): サンプリング動作の数学的表現、サンプリングを含む系の取扱とZ変換
(09) 11/27 ディジタル制御(3): ディジタル系安定性判別、ディジタル系のアナログ近似、演習出題
(10) 12/04 ディジタル制御(4): 有限整定とデッドビート応答
(11) 12/11 状態推定法、ディジタル制御演習
(12) 12/18 非線形制御入門(1)
(13) 01/15 非線形制御入門(2)演習出題
(14) 01/22 堀教授特別講義: 外乱オブザーバとロバスト制御の話 <==御本人に確認のうえ確定
(15) 01/29 予備日
(##) 02/05 期末テスト?
---
2. 教科書・参考書
堀・大西: 応用制御工学 丸善(準教科書指定)
ただし、これは教科書指定ではなく、推薦参考書なので、授業では該当ページを示すのみで板書の内容と一対一の対応にはなっていない。主として、自宅学習や演習問題を解く際の参考として活用してほしい。具体的にはいろいろと探してみて自分に合うと思う本を買って学ぶのが良い。
平井・羽根田・北村: システム制御工学 森北出版
金原・黒須: ディジタル制御入門 日刊工業新聞社
小郷・美多: システム制御理論入門 実教出版社
正田: 制御工学 培風館
新: 制御理論の基礎 昭晃堂
前田・杉江: アドバンスト制御のためのシステム制御理論
システム制御情報学会編 朝倉書店
MATLAB: SimuLink, Control tool boxなど
計測制御学会誌、電気学会雑誌、論文誌など
3. 授業の受け方
式を自分で追ってみる-------演習問題。
月曜午後の演習のようにSCILABなどを用いたシミュレーションもできると良い。
演習問題のレポートをすべて期限内に提出することを、期末試験を受ける条件とする。
A4の方眼紙をノートとせよ: 授業は基本的に板書を中心に行う。
色鉛筆を用意する-------作図の理解に便利。
昨今は振替休日のため、月曜日の講義の回数が少なく、最後に時間がなくなって非線形制御の解説は手薄になりがち。冬休みなどに「基礎制御工学」の相当部分を自主的に読んでもらえるとありがたい。
本資料の更新版をはじめ、講義中の資料は必要に応じて、http://takafumikoseki.blogspot.com/ から入手可能なようにアップロードします。
本講義の指定教科書はありません。下に推奨参考書として挙げている、堀洋一著「応用制御工学」(丸善出版)は生協、アマゾンなどで容易に入手可能と思いますが、問題があれば教えてください。
--以下、第1回目の講義に関わる資料--
制御工学第II
古関隆章・堀 洋一
Ext. 26676, koseki@koseki.t.u-tokyo.ac.jp
制御工学第一の内容(復習)
1.序論
1.1 制御工学とは何か
1.2 制御システムの例,分類
1.3 閉ループ制御と開ループ制御
1.4 制御工学の歴史
2.システム動特性の表現
2.1 信号伝達と状態遷移
2.2 動作点まわりの線形化
2.3 線形システムの表現
(2.4 ラプラス変換法の基礎)
2.5 ブロック図とその合成
2.6 特性の計測法
3.制御システムの安定性
3.1 線形システムの安定性
3.2 ラウスの安定判別法
3.3 ナイキストの安定判別法
3.4 フィードバック系の安定度指標
4.フィードバック制御系の基本特性
4.1 入力追従特性と外乱抑圧特性
4.2 定常誤差と誤差係数
4.3 2次系の過渡応答
4.4 2次系の周波数応答
4.5 高次系の代表根
5.線形フィードバック系の補償
5.1 フィードバック制御系設計の基本指針
5.2 直列補償とフィードバック補償
5.3 ニコルズ線図を用いた制御系設計
5.4 根軌跡を用いた制御系設計
5.5 直列補償とPID調節計
5.6 フィードバック補償
制御工学第二から制御Ⅰへ移行
古典的制御の復習と状態空間法との関係(フィードバック制御と多項式法など)
状態空間におけるシステム序論:連続量と離散量
制御工学第二講義予定
(01) 10/02 状態空間におけるシステムの取扱(1):夏学期の復習、状態変数と状態方程式、状態遷移行列
10/09 (休日)
(02) 10/16 状態空間におけるシステムの取扱(2): 実現問題、時間応答シミュレーション
(03) 10/23 状態空間におけるシステムの取扱(3):状態フィードバック、最適制御、演習出題
(04) 10/30 状態空間におけるシステムの取扱(4): 状態推定、システム同定
(06) 11/06 状態空間法、最適制御演習
(07) 11/13 ディジタル制御(1): 空間量子化と時間量子化
(08) 11/20 ディジタル制御(2): サンプリング動作の数学的表現、サンプリングを含む系の取扱とZ変換
(09) 11/27 ディジタル制御(3): ディジタル系安定性判別、ディジタル系のアナログ近似、演習出題
(10) 12/04 ディジタル制御(4): 有限整定とデッドビート応答
(11) 12/11 状態推定法、ディジタル制御演習
(12) 12/18 非線形制御入門(1)
(13) 01/15 非線形制御入門(2)演習出題
(14) 01/22 堀教授特別講義: 外乱オブザーバとロバスト制御の話 <==御本人に確認のうえ確定
(15) 01/29 予備日
(##) 02/05 期末テスト?
---
2. 教科書・参考書
堀・大西: 応用制御工学 丸善(準教科書指定)
ただし、これは教科書指定ではなく、推薦参考書なので、授業では該当ページを示すのみで板書の内容と一対一の対応にはなっていない。主として、自宅学習や演習問題を解く際の参考として活用してほしい。具体的にはいろいろと探してみて自分に合うと思う本を買って学ぶのが良い。
平井・羽根田・北村: システム制御工学 森北出版
金原・黒須: ディジタル制御入門 日刊工業新聞社
小郷・美多: システム制御理論入門 実教出版社
正田: 制御工学 培風館
新: 制御理論の基礎 昭晃堂
前田・杉江: アドバンスト制御のためのシステム制御理論
システム制御情報学会編 朝倉書店
MATLAB: SimuLink, Control tool boxなど
計測制御学会誌、電気学会雑誌、論文誌など
3. 授業の受け方
式を自分で追ってみる-------演習問題。
月曜午後の演習のようにSCILABなどを用いたシミュレーションもできると良い。
演習問題のレポートをすべて期限内に提出することを、期末試験を受ける条件とする。
A4の方眼紙をノートとせよ: 授業は基本的に板書を中心に行う。
色鉛筆を用意する-------作図の理解に便利。
昨今は振替休日のため、月曜日の講義の回数が少なく、最後に時間がなくなって非線形制御の解説は手薄になりがち。冬休みなどに「基礎制御工学」の相当部分を自主的に読んでもらえるとありがたい。
本資料の更新版をはじめ、講義中の資料は必要に応じて、http://takafumikoseki.blogspot.com/ から入手可能なようにアップロードします。
EA3 10/16開講予定の制御CAD演習に関して
今年は、履修者が前期・後期とも7名ですので、演習は工学部2号館12階にある古関研究室で行います。TAは古関研修士課程1年生の鈴木武海君で、担当教員は、電気工学科の堀洋一教授と古関です。演習には、電気系の学部生に配布して貸与してある情報理工学系研究科のノートPCを用いますので、履修者は10/16以降の履修日、月曜日には必ずそのPCを持って、13:00少し前に上記の古関研までお越しください。貸与のノートPCを用いての学習ということで、基本的に自宅での予習・復習を含む作業が可能になりますし、レポートの作成は自宅作業が多くなるかもしれませんが、シミュレーションの細かな技術については、先輩や教員の前で実際に議論しながら進めることに意味があると思いますので、出席も成績評価の重要な要素になることにご注意ください。
制御CADのツールとしては、フリーソフトのSciLabあるいはMATLABの学生版を用いることを強く推奨いたします。
参考のために、本年度の実験書に記載した内容を以下に再掲します。具体的な演習問題を含む教材は、演習の現場で配布の予定です。
-----
EA-3 MATLAB, Simulinkを用いた制御系CAD演習(2006年度)
担当: 堀洋一, 古関隆章
1.はじめに
制御工学は電気系のみならずあらゆる工学分野で用いられている基礎的な技術であり、この演習の受講者の多くはすでに夏学期の「制御工学I」を履修していることであろう。また、駒場4学期でも制御工学と非常に関連の深いラプラス変換を用いた微分方程式の取扱を必修科目として学んでいるはずである。しかし、そこでは、例題があくまでも紙の上の計算で扱える範囲の比較的単純なものに限定されざるを得ず、面白さと言う点でも、現実的なより複雑な問題を解決するためのトレーニングを行うという点でも物足りなさを感じたに違いない。
堀や古関の学生時代は、現在のように能力のすぐれた計算機・便利なソフトウェアが簡単に使える環境ではなく、時間応答のディジタルシミュレーションを行うことは、それ自体で数日を要する作業であった。たとえば、分母多項式を導出し、ニュートンラフソン法で多項式の解を求めるプログラムを作成し、留数の定理などを用いて各時間におけるラプラス逆変換を数値的に求め、さらに、それをグラフで表現するためのプログラムを作成するという作業を経てようやく一つの応答波形を可視化することができるという具合であった。さらに制御工学Iの授業で習ったような、いわゆる「古典制御理論」が盛んに研究された頃は、解析式の導出し、それを電気信号としてシミュレーションするためにアナログ・アンプを組み合わせて積分器や近似的な微分器の回路をつくり、その出力波形を観測しながら研究が進められていたと聞く。(これをアナログコンピュータと呼んでいた。)
今日では、幸いにして、高速の計算機と、プログラムやモデル作成の容易なグラフィック・インターフェース機能も含むソフトウェアが比較的簡単に手に入るようになっている。その代表的なものがこの演習で用いるMATLABで、もともとは行列の演算を扱う数値ライブラリ(サブルーチン集)を使いよくするために、変数をわたす部分のインターフェースを良くするツールとして生まれた。その後、それをベースにグラフィクスの機能などが強化され、商用の技術計算用言語として頒布されるようになった。さらに、フィルタ設計や最適化問題あるいは制御のシミュレーションなどに便利な、Toolboxと呼ばれるアプリケーションごとのルーチン集が別売りされるようになって、CADツールとして研究機関や産業界で広く用いられるようになった。MATLAB本体はあくまでもキャラクタ ベースでコマンドをスクリプトとして記述しプログラムを行う形態のツールであるが、制御の分野でMATLABが広く用いられる様になったのは、ブロック線図をカットアンドペーストでグラフィカルに作成することで非常に簡単に過渡応答の計算ができてしまうSimulinkというツールがMATLAB上で動くようになってからであろう。
本演習でもMATLABの基本機能と、Simulinkを必要に応じて使い分けながら作業を進めて行くが、その便利な機能を堪能すると同時に、安直にその便利さに溺れることなく、問題のもつ物理的本質やディジタルシミュレーションに伴う問題点に注意しながら、頭を使って計算の仮定や結果を考察するようにしよう。
与えられた問題の他に、自分自身で発展例題を作成しあるいは参考書を参照して興味のある問題を探してそれを解いてみることは大いに推奨される。ただし、この演習で用いているMATLAB/SimulinkはStudent Editionであるため複雑な問題を考えると、変数の数やブロックの上限が問題となる可能性があることに注意してほしい。(詳しいことはソフトウェアのマニュアルを参照。)
MATLAB/Simulinkの使い方に関しては、演習の現場でも指導を行うが、現場で閲覧できるStudent Edition のマニュアル(英語版)のほか、生協にもいくつかの成書が売られているし、web上のボランティア的な解説も多くなっていると思うので、それらを各自で選択して参照するとよい。たとえばこの演習の内容に近いものとしては
西村, 野波:「MATLABによる制御理論の基礎」東京電気大学出版局1998年
などが出版されている。またMATLABの概要を知りいくつかのデモをみたければ、このソフトを日本で販売しているサイバネット社のホームページを覗いてみると良いであろう。
MATLABの大学で用意したバージョンではオンラインヘルプもマニュアルもすべて英語で書かれているが、少し慣れれば難しいことはない。このようなマニュアルは、翻訳されたものよりも原文を読んだほうがずっとわかりやすいことを実際の作業の中でしばしば経験する。また、プログラム中のコメントやグラフの軸などもすべて英語で書かねばならない。技術的な英語を用いることにアレルギーを起こさず、良い訓練の機会と思って積極的に活用し、必要なtechnical termsを覚えてしまうと良い。
2.日程と学習内容
本演習は、週1回のペースで6週で完結する。その概要を以下の表に示す。主として制御工学Iの内容に準拠している。制御工学Iの教科書の該当箇所を読んで、準備をすることが可能である。具体的な演習問題説明などは、演習現場で与える配布プリントの中で与えている。制御工学IIの内容として演習の課題となりうるものとしては
2.1. ディジタル制御:Z変換
微分と疑似微分:Bode線図と波形の応答/Tustin 変換と厳密なZ変換の応答の比較
MatLabを用いたディジタルフィルタの設計
2.2. 状態方程式と伝達関数:相互の書き換え
極配置に基づく状態フィードバック
時不変線形システムの最適レギュレータ問題と結果として与えられる極配置の関係
2.3. 状態観測器の設計
2.4. 定常カルマンフィルタ
などが挙げられる。これらを本演習の基礎編で本格的に扱うことは時間の制約上残念ながらできないが、本年度は、制御工学第一の範囲で状態空間法入門を扱っているので、その演習も原理的に可能である。4回までの演習でMATLABを用いた作業に習熟したら、その後の選択課題の中で、これら冬学期の講義内容にも関係する課題に積極的に挑戦し、授業で習った内容の理解に役立て欲しい。
第1回: MATLAB/Simulink入門、微分方程式とラプラス変換
第2回: システムの応答, システムの周波数特性とボーデ線図, 安定性の解析: ラウスの判定法, フルビッツの判定法, ナイキストの判定法
第3回: 二次系の性質と極の位置, フィードバック制御の特性, フィードバック制御の設計
第4回: PI(D)制御とI-P(D)制御と分子多項式の影響/二自由度制御, フィードバックとフィードフォワード, 状態空間法入門
選択課題: 第5, 6回 発展課題:磁気浮上, 電気自動車の制御, カオス現象の解析と制御など
3. 参考書
なお、演習に役立つであろう制御理論に関する参考書としては、講義で指定している堀の教科書「制御工学の基礎」の他、
[1] 茅陽一:「制御工学第一」
[2] 細江繁幸:「システムと制御」オーム社
[3] 伊藤正美:「制御理論演習」 昭晃堂
[4] 平井一正, 羽根田博正, 北村新三:「システム制御工学」森北出版
などがあるので適宜自分の気に入ったものを参照して欲しい。(上記は比較的古い参考書なので、より新しいもので自分に合うものを探してみよ。)
4.有用なフリーソフトに関して
このガイダンスの文書は、Sun Microsystemsが本学の情報基盤センターを通じて学内関係者にフリーで使用権を認めてくれているStarSuiteというソフトを用いて作成している。本演習ではレポート用のワープロ、作図、数式エディタを用いてレポートをまとめたいという履修者の希望に対応するため、フリーソフトであるOpenOffice.orgを2002年度から導入した。その後、2003年度から、本来商用ソフトであるStarSuiteが東大関係者には自由に使えるようになったうえ、情報理工系のノートPCを各自が貸与されている現状では、そこに必要なソフトを自分でインストールして、StarSuiteあるいはLaTexを使用してレポーティングを行うことが推奨される。情報理工学系から貸与されているPCで学内LANから情報基盤センターに接続し、ダウンロードしてPCにインストールするとよい。(もちろん、一般向けに公開されているフリーソフトOpenOfficeもStarSuiteとほぼ同等の機能を有しているので、そちらを使用することは「フリー」である。)
-----情報基盤センターからの連絡------
> 下記のURLから、利用申請を行なうことができる。
> http://www.nc.u-tokyo.ac.jp/software-license/starsuite/
> ■教育用計算機システムのアカウントがあれば、そのIDとパスワードで認証を行い、ダウンロードする。
------------------------------------------------
アップデート用のソフトもあるのでSUNのページ http://jp.sun.com/starsuite/ も参照するとよい。
また、本演習で用いているMATLABは、比較的高価な商用ソフトであり、貸与ノートPCへのインストールを意図し自宅学習用に配布することはできない。一方、(このMATLABに対して俗称MATLABクローンと呼ばれる)数値計算用の優秀なフリーのソフトウェアが存在する。自習用にはフリーソフトSciLabをhttp://www-rocq.inria.fr/scilab/からダウンロードして、自分のPCにインストールし使用してみることも奨める。これらフリーソフトに関しては
早稲田大学の大石先生による数値計算の基礎教育のページ
http://www.oishi.info.waseda.ac.jp/~oishi/sir/index.html
メディアラボのホームページにあるフリーの科学技術計算用のプログラムの紹介
http://www.mlb.co.jp/linux/science/
特に、シミュリンク相当のツールもあるプログラムSciLab SciCOSの紹介
http://www.geocities.jp/rui_hirokawa/scilab/
などのページが参考になろう。このほかにもインターネットのキーワード検索で「Matlabクローン」などの用語で検索すると、様々な関連プログラムの情報が得られる。なお、これらのフリーソフトウェアに関する情報は、古関の個人HP (http://www.geocities.jp/takafumikoseki/)にも掲載している。
制御CADのツールとしては、フリーソフトのSciLabあるいはMATLABの学生版を用いることを強く推奨いたします。
参考のために、本年度の実験書に記載した内容を以下に再掲します。具体的な演習問題を含む教材は、演習の現場で配布の予定です。
-----
EA-3 MATLAB, Simulinkを用いた制御系CAD演習(2006年度)
担当: 堀洋一, 古関隆章
1.はじめに
制御工学は電気系のみならずあらゆる工学分野で用いられている基礎的な技術であり、この演習の受講者の多くはすでに夏学期の「制御工学I」を履修していることであろう。また、駒場4学期でも制御工学と非常に関連の深いラプラス変換を用いた微分方程式の取扱を必修科目として学んでいるはずである。しかし、そこでは、例題があくまでも紙の上の計算で扱える範囲の比較的単純なものに限定されざるを得ず、面白さと言う点でも、現実的なより複雑な問題を解決するためのトレーニングを行うという点でも物足りなさを感じたに違いない。
堀や古関の学生時代は、現在のように能力のすぐれた計算機・便利なソフトウェアが簡単に使える環境ではなく、時間応答のディジタルシミュレーションを行うことは、それ自体で数日を要する作業であった。たとえば、分母多項式を導出し、ニュートンラフソン法で多項式の解を求めるプログラムを作成し、留数の定理などを用いて各時間におけるラプラス逆変換を数値的に求め、さらに、それをグラフで表現するためのプログラムを作成するという作業を経てようやく一つの応答波形を可視化することができるという具合であった。さらに制御工学Iの授業で習ったような、いわゆる「古典制御理論」が盛んに研究された頃は、解析式の導出し、それを電気信号としてシミュレーションするためにアナログ・アンプを組み合わせて積分器や近似的な微分器の回路をつくり、その出力波形を観測しながら研究が進められていたと聞く。(これをアナログコンピュータと呼んでいた。)
今日では、幸いにして、高速の計算機と、プログラムやモデル作成の容易なグラフィック・インターフェース機能も含むソフトウェアが比較的簡単に手に入るようになっている。その代表的なものがこの演習で用いるMATLABで、もともとは行列の演算を扱う数値ライブラリ(サブルーチン集)を使いよくするために、変数をわたす部分のインターフェースを良くするツールとして生まれた。その後、それをベースにグラフィクスの機能などが強化され、商用の技術計算用言語として頒布されるようになった。さらに、フィルタ設計や最適化問題あるいは制御のシミュレーションなどに便利な、Toolboxと呼ばれるアプリケーションごとのルーチン集が別売りされるようになって、CADツールとして研究機関や産業界で広く用いられるようになった。MATLAB本体はあくまでもキャラクタ ベースでコマンドをスクリプトとして記述しプログラムを行う形態のツールであるが、制御の分野でMATLABが広く用いられる様になったのは、ブロック線図をカットアンドペーストでグラフィカルに作成することで非常に簡単に過渡応答の計算ができてしまうSimulinkというツールがMATLAB上で動くようになってからであろう。
本演習でもMATLABの基本機能と、Simulinkを必要に応じて使い分けながら作業を進めて行くが、その便利な機能を堪能すると同時に、安直にその便利さに溺れることなく、問題のもつ物理的本質やディジタルシミュレーションに伴う問題点に注意しながら、頭を使って計算の仮定や結果を考察するようにしよう。
与えられた問題の他に、自分自身で発展例題を作成しあるいは参考書を参照して興味のある問題を探してそれを解いてみることは大いに推奨される。ただし、この演習で用いているMATLAB/SimulinkはStudent Editionであるため複雑な問題を考えると、変数の数やブロックの上限が問題となる可能性があることに注意してほしい。(詳しいことはソフトウェアのマニュアルを参照。)
MATLAB/Simulinkの使い方に関しては、演習の現場でも指導を行うが、現場で閲覧できるStudent Edition のマニュアル(英語版)のほか、生協にもいくつかの成書が売られているし、web上のボランティア的な解説も多くなっていると思うので、それらを各自で選択して参照するとよい。たとえばこの演習の内容に近いものとしては
西村, 野波:「MATLABによる制御理論の基礎」東京電気大学出版局1998年
などが出版されている。またMATLABの概要を知りいくつかのデモをみたければ、このソフトを日本で販売しているサイバネット社のホームページを覗いてみると良いであろう。
MATLABの大学で用意したバージョンではオンラインヘルプもマニュアルもすべて英語で書かれているが、少し慣れれば難しいことはない。このようなマニュアルは、翻訳されたものよりも原文を読んだほうがずっとわかりやすいことを実際の作業の中でしばしば経験する。また、プログラム中のコメントやグラフの軸などもすべて英語で書かねばならない。技術的な英語を用いることにアレルギーを起こさず、良い訓練の機会と思って積極的に活用し、必要なtechnical termsを覚えてしまうと良い。
2.日程と学習内容
本演習は、週1回のペースで6週で完結する。その概要を以下の表に示す。主として制御工学Iの内容に準拠している。制御工学Iの教科書の該当箇所を読んで、準備をすることが可能である。具体的な演習問題説明などは、演習現場で与える配布プリントの中で与えている。制御工学IIの内容として演習の課題となりうるものとしては
2.1. ディジタル制御:Z変換
微分と疑似微分:Bode線図と波形の応答/Tustin 変換と厳密なZ変換の応答の比較
MatLabを用いたディジタルフィルタの設計
2.2. 状態方程式と伝達関数:相互の書き換え
極配置に基づく状態フィードバック
時不変線形システムの最適レギュレータ問題と結果として与えられる極配置の関係
2.3. 状態観測器の設計
2.4. 定常カルマンフィルタ
などが挙げられる。これらを本演習の基礎編で本格的に扱うことは時間の制約上残念ながらできないが、本年度は、制御工学第一の範囲で状態空間法入門を扱っているので、その演習も原理的に可能である。4回までの演習でMATLABを用いた作業に習熟したら、その後の選択課題の中で、これら冬学期の講義内容にも関係する課題に積極的に挑戦し、授業で習った内容の理解に役立て欲しい。
第1回: MATLAB/Simulink入門、微分方程式とラプラス変換
第2回: システムの応答, システムの周波数特性とボーデ線図, 安定性の解析: ラウスの判定法, フルビッツの判定法, ナイキストの判定法
第3回: 二次系の性質と極の位置, フィードバック制御の特性, フィードバック制御の設計
第4回: PI(D)制御とI-P(D)制御と分子多項式の影響/二自由度制御, フィードバックとフィードフォワード, 状態空間法入門
選択課題: 第5, 6回 発展課題:磁気浮上, 電気自動車の制御, カオス現象の解析と制御など
3. 参考書
なお、演習に役立つであろう制御理論に関する参考書としては、講義で指定している堀の教科書「制御工学の基礎」の他、
[1] 茅陽一:「制御工学第一」
[2] 細江繁幸:「システムと制御」オーム社
[3] 伊藤正美:「制御理論演習」 昭晃堂
[4] 平井一正, 羽根田博正, 北村新三:「システム制御工学」森北出版
などがあるので適宜自分の気に入ったものを参照して欲しい。(上記は比較的古い参考書なので、より新しいもので自分に合うものを探してみよ。)
4.有用なフリーソフトに関して
このガイダンスの文書は、Sun Microsystemsが本学の情報基盤センターを通じて学内関係者にフリーで使用権を認めてくれているStarSuiteというソフトを用いて作成している。本演習ではレポート用のワープロ、作図、数式エディタを用いてレポートをまとめたいという履修者の希望に対応するため、フリーソフトであるOpenOffice.orgを2002年度から導入した。その後、2003年度から、本来商用ソフトであるStarSuiteが東大関係者には自由に使えるようになったうえ、情報理工系のノートPCを各自が貸与されている現状では、そこに必要なソフトを自分でインストールして、StarSuiteあるいはLaTexを使用してレポーティングを行うことが推奨される。情報理工学系から貸与されているPCで学内LANから情報基盤センターに接続し、ダウンロードしてPCにインストールするとよい。(もちろん、一般向けに公開されているフリーソフトOpenOfficeもStarSuiteとほぼ同等の機能を有しているので、そちらを使用することは「フリー」である。)
-----情報基盤センターからの連絡------
> 下記のURLから、利用申請を行なうことができる。
> http://www.nc.u-tokyo.ac.jp/software-license/starsuite/
> ■教育用計算機システムのアカウントがあれば、そのIDとパスワードで認証を行い、ダウンロードする。
------------------------------------------------
アップデート用のソフトもあるのでSUNのページ http://jp.sun.com/starsuite/ も参照するとよい。
また、本演習で用いているMATLABは、比較的高価な商用ソフトであり、貸与ノートPCへのインストールを意図し自宅学習用に配布することはできない。一方、(このMATLABに対して俗称MATLABクローンと呼ばれる)数値計算用の優秀なフリーのソフトウェアが存在する。自習用にはフリーソフトSciLabをhttp://www-rocq.inria.fr/scilab/からダウンロードして、自分のPCにインストールし使用してみることも奨める。これらフリーソフトに関しては
早稲田大学の大石先生による数値計算の基礎教育のページ
http://www.oishi.info.waseda.ac.jp/~oishi/sir/index.html
メディアラボのホームページにあるフリーの科学技術計算用のプログラムの紹介
http://www.mlb.co.jp/linux/science/
特に、シミュリンク相当のツールもあるプログラムSciLab SciCOSの紹介
http://www.geocities.jp/rui_hirokawa/scilab/
などのページが参考になろう。このほかにもインターネットのキーワード検索で「Matlabクローン」などの用語で検索すると、様々な関連プログラムの情報が得られる。なお、これらのフリーソフトウェアに関する情報は、古関の個人HP (http://www.geocities.jp/takafumikoseki/)にも掲載している。
通信手段に関して
これまで、情報公開はYahoo Geocitiesを中心に行ってきたのですが、本日からはこのブログを主とします。しかし、pdfなどの文書ファイルを置くことがGoogleのブログ環境のみだと難しいかもしれませんので、これについては、Yahoo Japan のブリーフケースを利用します。講義の内容に関するファイルには、特に著作権などの関係でネット上での公開に問題の無い場合を除き、講義の時間中にお伝えするPWをかけることにします。また、お寄せいただいたご質問、ご意見にも原則的に講義の中で直接お答えすることにします。このページおよびそこからのリンクは、従前の講義における補助的な「配布プリント」の機能を代替するものとお考えください。
そのほか、e-mailやスカイプ(古関のスカイプ名はtakafumikoseki)での通信も補助的にお使いください。
しかし、最善の方法は直接講義の時間、演習の時間、あるいは本郷キャンパスの工学部2号館12階にある古関の研究室にお越しいただき、直接議論をすることだと思います。大学という直接話のできる機会のある以上、直接の面談に勝る通信の方法は無いでしょう。
そのほか、e-mailやスカイプ(古関のスカイプ名はtakafumikoseki)での通信も補助的にお使いください。
しかし、最善の方法は直接講義の時間、演習の時間、あるいは本郷キャンパスの工学部2号館12階にある古関の研究室にお越しいただき、直接議論をすることだと思います。大学という直接話のできる機会のある以上、直接の面談に勝る通信の方法は無いでしょう。
「制御工学第二」10/2開講について
講義の内容および参考書等に関する情報は後刻このページにお出ししますが、開講は明日10/2の月曜日1限ですので、ご注意ください。
最初は出席者も少ないかと思いますので、前期の堀洋一教授による
「制御工学第一」の復習と、講義のやり方に関する一般的説明に内容を限定したいと思っています。
最初は出席者も少ないかと思いますので、前期の堀洋一教授による
「制御工学第一」の復習と、講義のやり方に関する一般的説明に内容を限定したいと思っています。
ページ開設の経緯
これまで大学の講義に関する連絡を、YahooのGeocitiesを利用して公開していましたが、フォーマットが非常に原始的であったことに自分自身でも不満があったのに加え、どうしても更新がタイムリーに行えないという問題を感じていました。ブログを利用することで、これらの欠点を解決し、より良い情報提供ができればと考え、今回主たる情報提供の場をこのブログに移すことにしました。また、コメントをフィードバックしてもらえる「双方向コミュニケーション」という道具立てにより、当初こちらで意図していなかったような発展もあればありがたいと期待しています。
いただいたコメントに、個別にお答えすることはできませんが、いただいたご意見は真摯に読ませていただき講義の改善に役立てたいと思っています。
このページはあくまでも講義の補助という位置づけですので、このページでの情報提供だけで「知識の伝達」が完結するわけではないということをどうか最初に良くご理解ください。講義内容に関するご意見やご質問も、講義の場でしていただくということが、真面目に参加しているほかの学生さんのためにもなるという意味で重要だと考えています。
古関が2006年度の冬学期に担当する科目は、月曜日1限の「制御工学第二」(学部3年生向け、10/2開講予定) および月曜午後の「EA3 制御CAD演習」(10/9が休日のため10/16開講予定)です。本年度は大学院講義の担当はありません。
いただいたコメントに、個別にお答えすることはできませんが、いただいたご意見は真摯に読ませていただき講義の改善に役立てたいと思っています。
このページはあくまでも講義の補助という位置づけですので、このページでの情報提供だけで「知識の伝達」が完結するわけではないということをどうか最初に良くご理解ください。講義内容に関するご意見やご質問も、講義の場でしていただくということが、真面目に参加しているほかの学生さんのためにもなるという意味で重要だと考えています。
古関が2006年度の冬学期に担当する科目は、月曜日1限の「制御工学第二」(学部3年生向け、10/2開講予定) および月曜午後の「EA3 制御CAD演習」(10/9が休日のため10/16開講予定)です。本年度は大学院講義の担当はありません。
古関隆章のページを新たに開設します。(2006.10.01)
詳しい経過を後ほど書き足したいと思いますが、冬学期の開講に先立ち、本日大学での教育に関する連絡を主たる目的として、古関隆章のブログのページを開設いたします。古関の活動に関しては、古関研究室の公式ホームページをご覧ください。 また、これまでの古関からの連絡については、Yahoo上の、古関の個人ホームページに掲載してあります。
登録:
投稿 (Atom)